Moving servos using ASCII commands typed into a terminal emulator to control
the servo controller via a serial link soon lost it’s appeal.
I’m currently working on a little Java Swing app to allow me to configure a
robot and interactively adjust servos in order to derive configuration
parameters such as minimum/maximum movement angle and the best “rest position”
to start the servo up in.
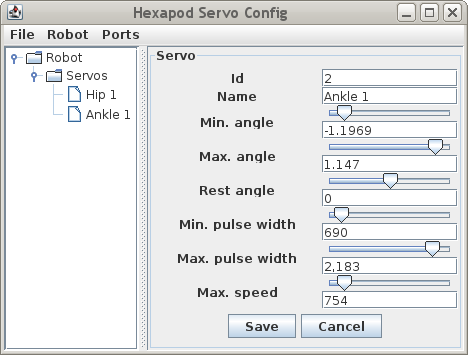
RoboConfig UI (such as it is currently)
There’s currently not much to the application - a tree widget shows the robot
structure and clicking on tree nodes shows the appropriate editor pane on the
right. Currently, I can only create servo configuration data but the goal is
to eventually allow me to manipulate a representation of the mechanics of the
robot and allow some simulation of the hardware to make algorithm development
easier.
The software uses RXTX to find serial interfaces and
communicate with the servo controller.