I’d originally planned to run all the servo connections under the legs and up
through the hub, however that seemed like a recipe for snagged cables and so I
gave up on that idea and ran the cables from the “hip” servos up through the
hub and the overs over the top of the legs.
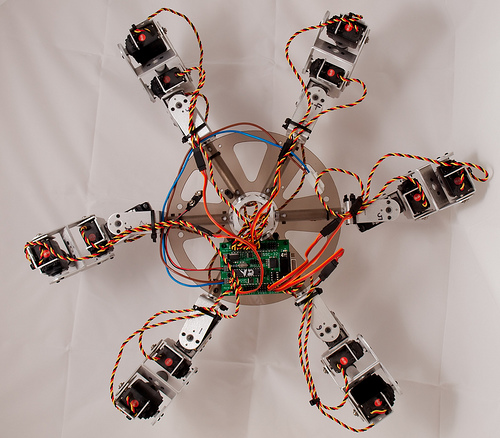
plan view
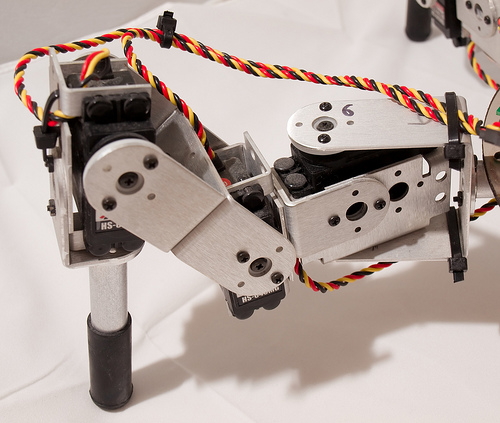
Here you can see the cables from the outer leg servos running over the top of
the leg.

Leg plan view
This side view gives another view of the way the cables are arranged. I ended
up depending on cable ties way more than I would have liked. There’s one on
the outermost servo to keep the cable from getting trapped in the leg joint.
One each on the top and bottom of each hip to keep the cables from ending up
all over the place and another to keep the top pair of cables together in the
hope that they are less liklely to snag things.
Leg side view
This shows the wired up robot with a high stance.
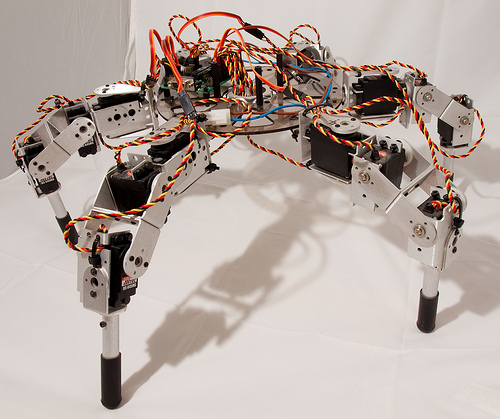
High stance
Here with a low stance.
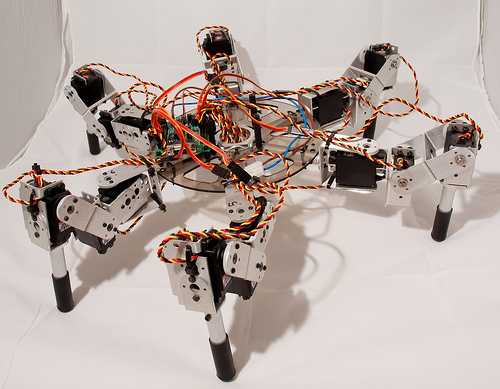
Low stance
I’ve tested the
SSC-32
controller with a single servo, now I just need to check that it can drive all
- The next step is to program the thing to walk tethered to a computer and
then to start adding the final control electronics - currently planned to be a
GP2X Linux game handheld - to the robot
so it can operate autonomously.