I’ve been fascinated by robotics for a long while but have not done very much - mostly because I like programming a lot more than I like hacking hardware. However, in 2006 I decided to have a go at building a hexapod (6-legged robot) using parts from lynxmotion.com. I got all enthusiastic for a while and then moving from Antibes to London and staring a new job led to me putting the project to one side for over 18 months. I’ve started working on it again so this first article just summaries progress up to now.
I decided at the beginning that a microcontroller wasn’t going to provided enough compute power for some of the thins I wanted to try so I thought I’d use a micro ITX board for the controller as I’d be able to run a modest Linux install.
Tranquil T3 PC
I had to take a hacksaw to the case of the Tranquil T3 and the WG311 mounting plate had to come off but the Netgear wireless LAN card is now installed. I need to convince Linux to talk to it now…
Tranquil T3 with Netgear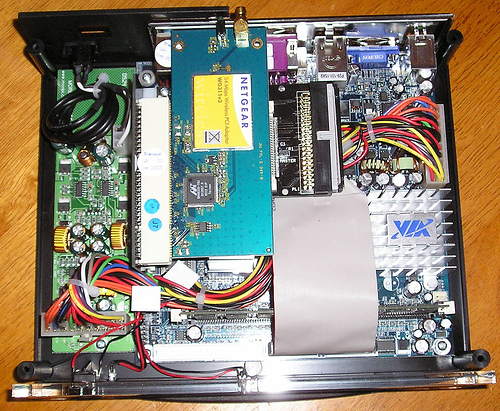
Robot bits
The bits arrived, Now all I need to do is construct a 6-legged robot out of all this

Complete leg
One of 6 legs for a 6-legged (hexapod) robot. Each leg has 3 servos.

Skeleton
Complete hexapod skeleton

Complete mechanics
Complete mechanics

Me holding the complete hexapod mechanics to show the scale. Now the mechanics are complete the fun stuff (programming) begins.
Dr Frankenstein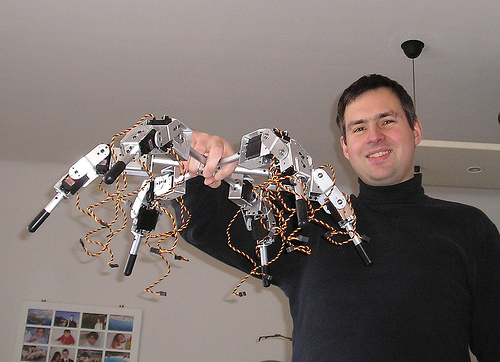
I discovered the GP2X and decided that would make a cool controller since it already runs Linux and is designed to be battery power. Even the breakout board and GP2X together are quite small and light and run off a 3v power source and so perfect for battery operation.
The GP2X therefore displaces my micro ATX board as the main contender for the robot controller. Unfortunately, I found I like it too much for game playing so had to visit ebay to get a second one for the robot.
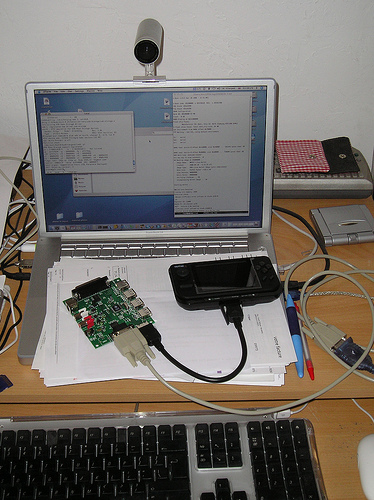
GP2X and breakout board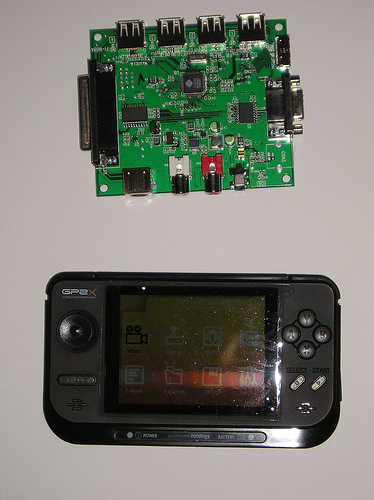
The GP2X is plugged into the breakout board using its EXT port and the
breakout board board’s serial port is plugged into the laptop allowing me to
get debugging info out of the GP2X
Gp2X test setup