After some discussion on Aldebaran Robotics Developer program‘s
forum a few of the UK developers decided to meetup in London. We were lucky
enough to be joined by Jerome Monceaux, the architect of the NAO platform and
Akim, the developer program community manager who came over from Paris to
spend the day with us.
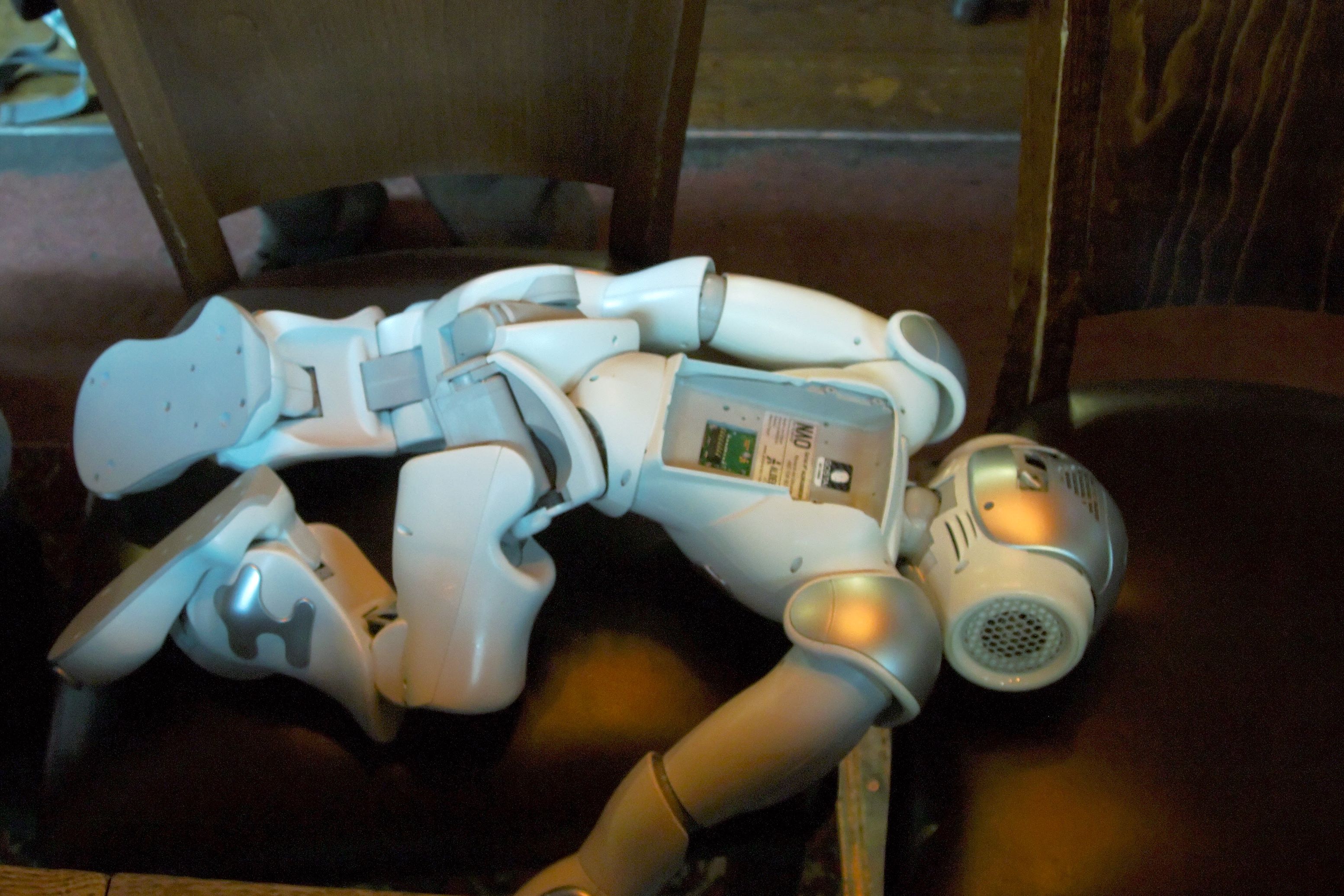
After introducing ourselves, the first order of business was a little surgery
on Tim’s NAO to replace some stripped screws on the battery compartment.
Here’s Tim’s NAO with the battery out - the serial number is written in the
battery compartment - this apparently differs from the body serial number
reported by software.
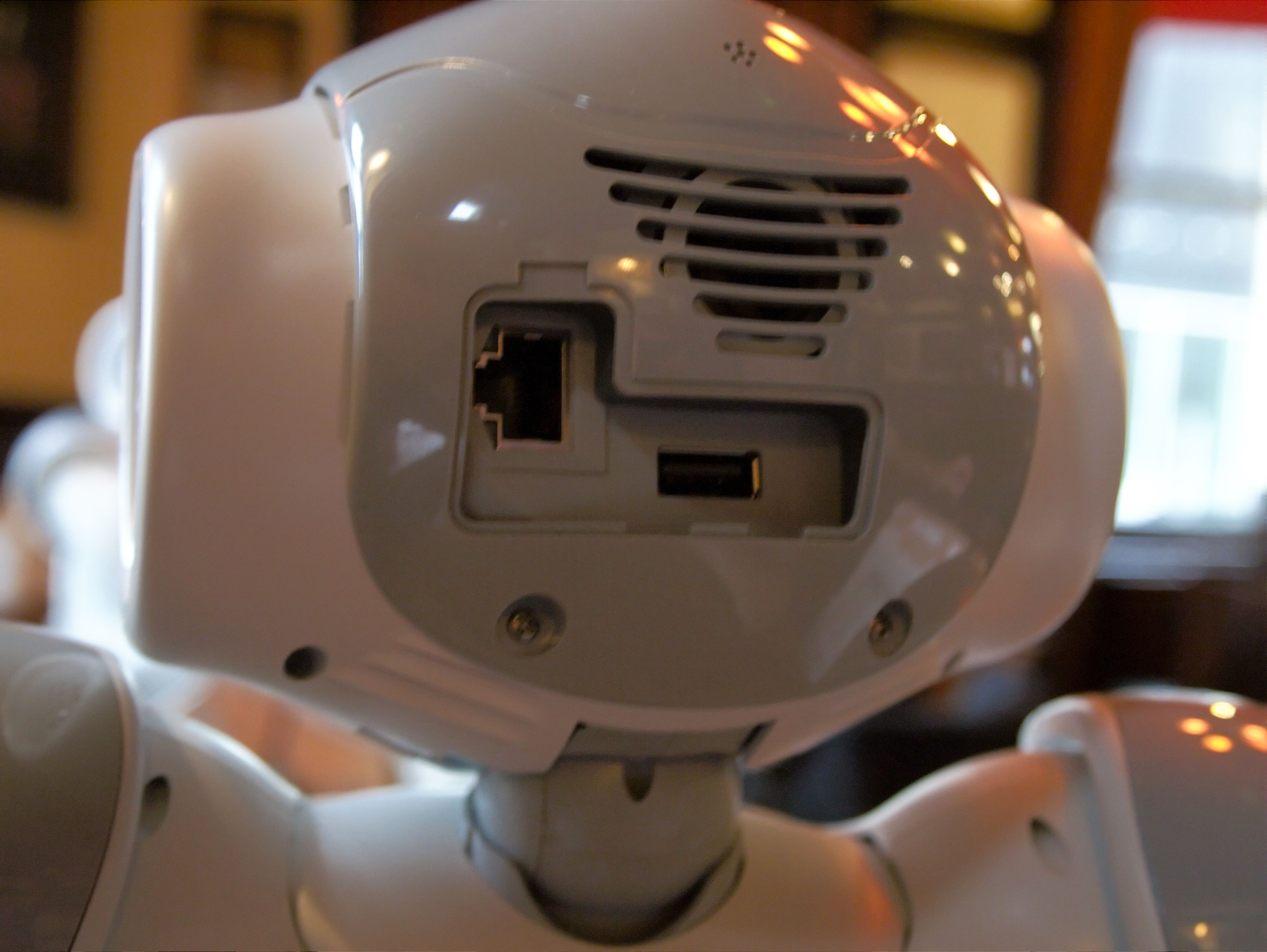
NAO4
The big surprise of the day was that Akim & Jerome had a brought a NAO4 with
them - naturally it did not stay in its box for too long after we found out.
One visible difference between NAO3 and NAO4 is that NAO4 has a standard USB
type-A socket which can be used for interfacing standard USB equipment such as
a Bluetooth interface (for regulatory reasons Aldebaran are not currently able
to ship NAO with integrated bluetooth) .
Jerome took us through a short presentation on the improvements to the
platform in NAO4. Overall the body is much the same except for an increase in
the PWM frequency used to control the motors. It’s NAO4’s head that contains
most of the interesting changes, including:
- a faster processor (Intel Atom)
- significantly more RAM
- improved cooling system
- better cameras - not only do these have increased resolution and better noise reduction, NAO4 is capable of running both cameras simultaneously (NAO3 can only use one camera at a time).
- Much better speech recognition - The acapela engine has been replaced by Nuance.
- The cameras are more securely attached to the head - in NAO3 it is possible for the cameras to be knocked slightly out of alignment if NAO falls over; this will not happen with NAO4
NAO4 boots noticeably faster than NAO3.
All developers currently on the NAO development programme will be offered an
upgrade to a NAO4 head (keeping the NAO3 body).
NAO store
Jerome gave a demonstration of the NAOstore - it works pretty much how you’d
expect a modern app store to work. There are several cool features though such
as:
- Apps getting automatically downloaded direct to your NAO after adding them via the NAOstore website.
- The ability to set a trigger phrase to cause NAO to run the app
At the moment it’s only possible to trigger apps in response to a spoken
phrase, but in future Aldebaran may add the ability to have other means to
trigger an app. NAO’s life was already a means to run various behaviours on
NAO - it’s now becoming a framework to download and manage applications
downloaded from the NAOstore.
NAO’s life has a concept of channels. A channel is just a way to group
behaviours with automatic updates with contextual triggers - the robot decides
when to trigger the behaviour. at the moment there is only one, but the intent
is to add the ability to create new channels.
Developing for NAO
One of the best parts of the day was having the chance to grill Jerome about
developing for NAO and he graciously answered all our questions.
Jerome advised us to start with small simple applications in order to get used
to the environment without also having try and create complex behaviour at the
same time. As an example he demonstrated the “touch my head” application. See
the video below.
There are several ways to create applications for NAO
- Graphically using Choreographe which provides a graphical view of component behaviours which can be “wired” together (and which works in a similar way to the Lego Mindstorms development environment) combined with a timeline view with key frames(similar to the way the original flash editor works)
- Python - Python code can either run independently or integrated with Choreographe. Python and Choreographe are tightly integrated so that new behaviours can be implemented in Python and represented as “boxes” which can be wired together graphically in Choreographe
- Native code (C++)
- URBIscript
Having not had much time to play with Choreographe apart from having tried
some simple experiments I was surprised by the depth and power that Jerome
demonstrated. All boxes shown in Choreographe have a script, flow diagram and
timeline (not visible by default). Each timeline can have multiple keyframes
with each keyframe having its own flow diagram. For example you might use:
- one frame to initialize configuration data
- one to download functions
- another to perform the action
The script associated with a box is a Python class with methods corresponding
to events linked to the box (eg receiving input). You can define as many
inputs and outputs on a box as required and each will have a corresponding
method or property in the Python script. The onload method, called when the
box is loaded, provides the ability to create objects for use by the rest of
the behaviour.
Having assumed that “real” applications would need to be developed in native
code or python I now feel that a better approach may be to develop modular re-
usable components and wire them together using Choreographe.
I’ve spent most of the last ten years writing either in Java, javascript & C++
and having a strong interest in other
JVM languages, I was a
little disappointed that there was not better integration with the JVM but I
can understand Aldebaran Robotics’s reasoning - Python has always been more
popular in the academic community than Java and I imagine that most NAOs
outside Aldebaran are currently located in academia. Python is a powerful and
relatively fast language and although I don’t really like the way indentation
is used to indicate structure I imagine I’ll be spending a lot more time
writing in Python from now on.
That said, Jerome said that SOAP is used for communication between remote
components and so it’s perfectly feasible to write code on a remote computer
that interacts with NAO. Version 1.12 of the NAO software (currently in beta)
contains a Java binding that allows any module to be invoked from Java -
however since NAO does not run a Java virtual machine use of Java is limited
to software on a remote machine. It’s still a great feature to have though and
I’m sure I’ll be making use of this once I feel ready to create projects too
large to run only on NAO.
The NAO runtime is divided into modules implementing the ALmodule interface.
Module code is not invoked directly - instead a proxy object is created and
this is used to perform operations using a module. NAOqi contains a broker
which is just a bag of modules and provides a way to locate a module by name.
Operations on proxies are synchronous by default however it is possible to
call methods asynchronously: If myproxy.foo() invokes the synchronous
operation “foo” on myproxy then myproxy.post.foo() will execute it
asynchronously and return an ID that allows the asynchronous operation to be
referenced (for example to test whether it has finished).
NAOqi contains a fine-grained resource management system. It’s possible to
lock resources for a behaviour and the runtime will prevent other scripts from
using the resource until it’s unlocked. A nice feature is that, since
resources are organised hierarchically, it’s possible with a single lock to
lock the whole robot, a whole limb or a single motor.
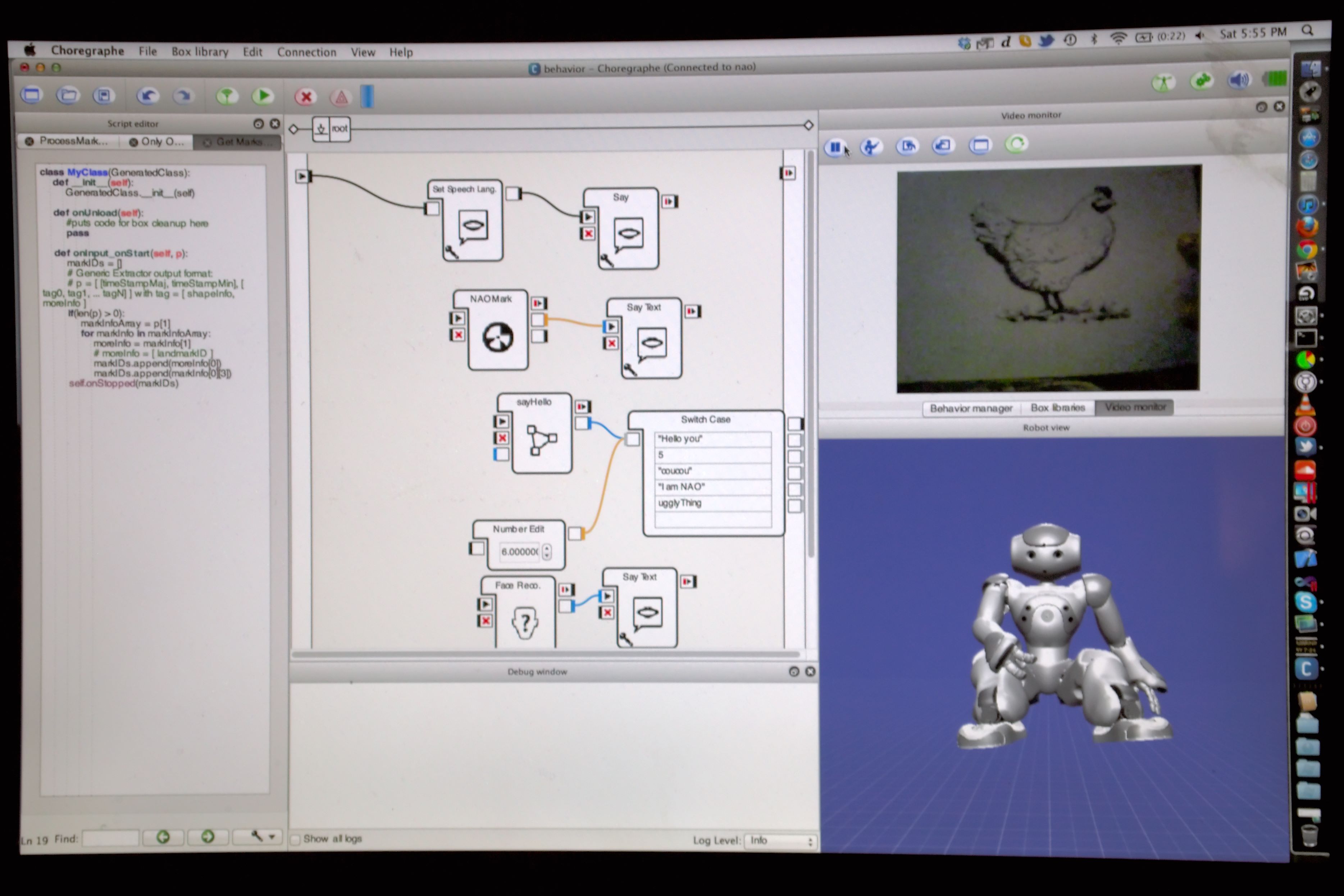
NAO includes a version of OpenCV with
Python bindings which can be used for, among other things image recognition.
There is some support for generating training data built into Choreographe.
Below is a photo of the screen when Jerome was demonstrating how to create a
training set using Choreographe.
Random tips
Throughout the day I learned a lot from listening to Jerome (twitter: ), Carl
(twitter: @CC64)l & Tim (twitter:
@mechomaniac). Here’s a selection of
various useful bits of information:
When saving Choreographe projects same them as a directory, not a .crg file
since it makes it easier to commit the porject to git and allows all parts of
the project to have there changes to be tracked independently.
It’s possible to use ssh to connect to the Linux instance running on NAO.
Executing ssh nao@nao.local (default password nao) from a terminal window
should result in opening a session on NAO from which you can invoke Linux
commands an start an interactive Python session allowing you to interactively
experiment directly on NAO. If starting python in this way you’ll need to
manually import the modules you need (eg import opencv).
There is a logging module (ALLogger) that allows python code to write to a log
in order to help post-mortem debugging. ALLogger can be used either by
creating a proxy to it like any other modules or by using the self.log
reference (with methods debug, info, warn, error) in any Choreographe script.
here is a preference server running on Aldebaran Robotics’s website from which
NAO can download user depdendent configuration information for an application.
The communication takes place over an XMPP transport and is in XML format
(SOAP?).
NAO marks - these are cards that NAO can recognise. They are all numbered
allowing applications to perform actions based on what card is recnogised.
There is a PDF on the Choreoraphe CD and more can be downloaded (in PDF) from
the Aldebaran website. You can then print these and use the NAOmark box in
Choreographe to detect them.
The Python bindings are the most convenient way to use OpenCV. The
getMethodHelp(“”) function gives interactive help on the named OpenCV method.
Summary
A geek event does not get much better that this (IMHO) - a combination of very
knowledgeable (and gracious) people, robots, beer and food! Not only did I
learn a lot about NAO but I cam away inspired to learn more and develop my own
applications. I’m very grateful to Jerome and Akim for giving up their own
time to spend a day with us. Jerome and Akim demonstrated a sincere enthusiasm
and desire to help the NAO developer community and if there is any justice in
the world Aldebaran Robotics and NAO deserves massive success. I think the
only question mark regarding NAO is how to bring the platform to a wider
audience and I believe the availability of killer applications will play a
part in this - for this Aldebaran needs a vibrant developer community and
seems to be doing exactly the right things in this regard. 
About Aldebaran Robotics & the NAO developer program
You can find find out more about Aldebaran Robotics via their website www.aldebaran-robotics.com and the developer program at developer.aldebaran-
robotics.com. The
blog is also a good source of
information on what NAO developers are doing. You can also follow the NAO
developer program on Twitter as
@NAOdeveloper and on
facebook.